
2025年被視為人形機器人商業(yè)化落地的關鍵元年。特斯拉宣布Optimus機器人將于年內(nèi)小規(guī)模投產(chǎn),優(yōu)先用于工廠重復性勞動場景,并計劃2026年實現(xiàn)量產(chǎn);國內(nèi)企業(yè)如智元、優(yōu)必選、宇樹科技等也在加速布局,優(yōu)必選Walker S1已在比亞迪、富士康等工廠實訓,在實際應用中實現(xiàn)了物流搬運效率的大幅提升。機器人行業(yè)是顯著的需求端驅動型產(chǎn)業(yè),例如老齡化加劇催生“機器換人”,而工業(yè)制造、家庭服務、醫(yī)療康養(yǎng)等場景持續(xù)拓寬,具身智能機器人正從“實驗室奇觀”邁向“產(chǎn)業(yè)剛需” 。

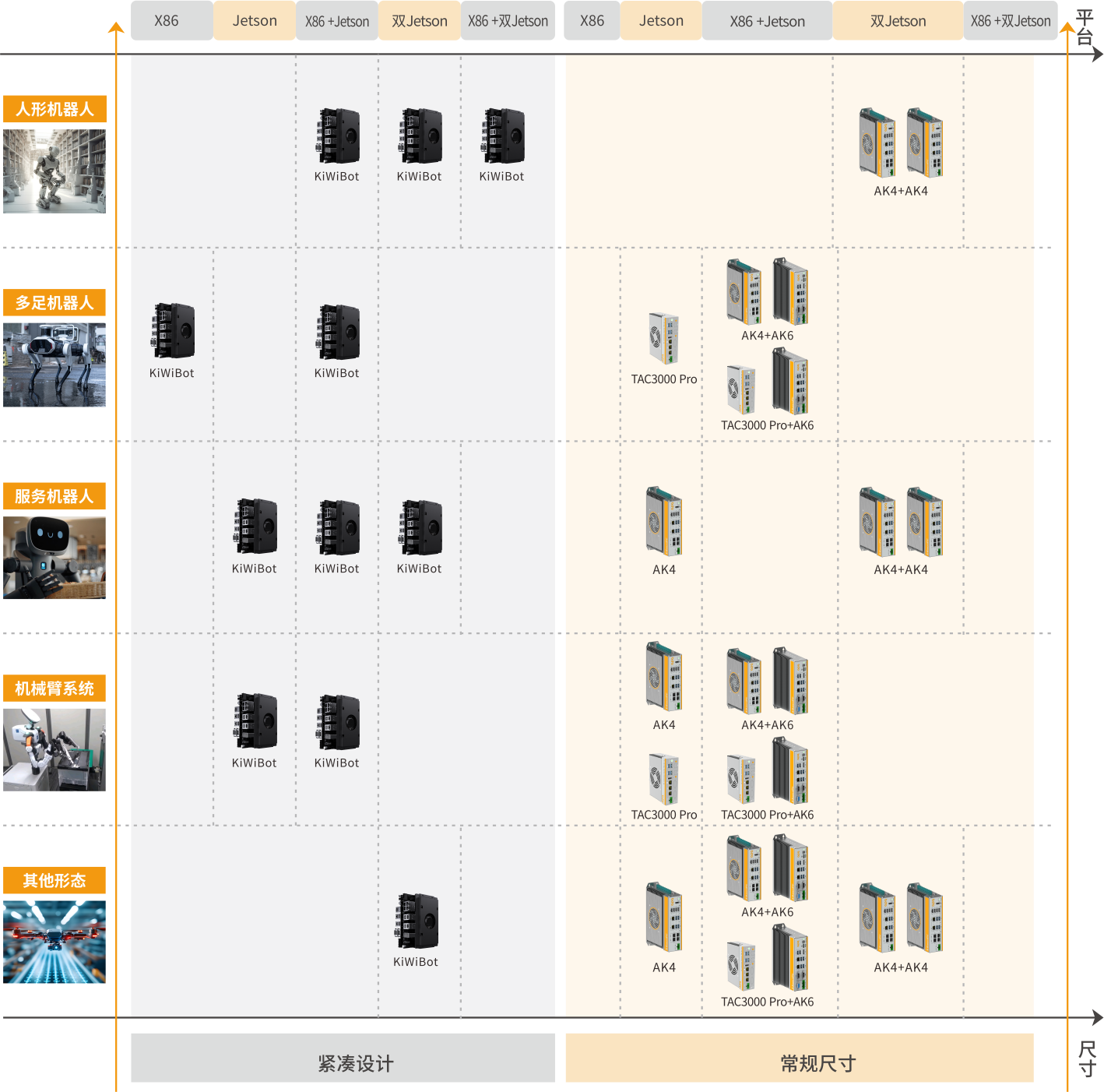
從娛樂表演到工業(yè)制造,從科研教育到公共服務,在分化趨勢下,具身智能機器人可以主要分為泛娛樂型、科研教育型、工業(yè)型、商用服務型四大應用方向,在不同場景中,機器人的形態(tài)、身高、功能、成本都會隨著場景應用需求而變化。
泛娛樂型人形機器人:少硬件、輕算力——“性價比至上”

科研教育型人形機器人:高算力、高性能——“兼顧功能與預算”

工業(yè)型人形機器人:高精度、高價值——“追求穩(wěn)定與可靠”

服務型人形機器人:多變化、強互動——“考驗適配能力”

阿普奇KiWiBot系列:“雙腦協(xié)同”架構的技術支持
●感知大腦:搭載NVIDIA Jetson AGX Orin芯片,提供275TOPS算力,可并行處理多路攝像頭數(shù)據(jù)流,支持多模態(tài)感知與智能決策;
●?運控小腦:采用Intel x86處理器,依托EtherCat實現(xiàn)數(shù)據(jù)高速互通,支持多軸伺服電機的力矩閉環(huán)控制,縮短控制周期,較傳統(tǒng)CAN總線速率提升顯著。
發(fā)布時間: 05-14-2025


